COLLABORATIVE, ROBOTIC WORKCELL
For Real World Manufacturing
Introduction
According to the International Federation of Robotics (IFR), 2014 was a record year for robot deliveries with over 225,000 units delivered worldwide – an increase of 27% over the previous year (see Figure 1). Over 62% of these deliveries went to countries in Asia led by China (40%), South Korea (28%), and Japan.[i]

Figure 1: Worldwide Robot Sales
In their most recent market study, the Boston Consulting Group (BCG) speculates that several key factors are responsible for this spike in robot sales. One significant factor sited by the study is the rising cost of labor around the world, which has caused manufacturers to take steps to increase their output per worker in order to stay competitive. In addition, BCG sites advances in peripheral technologies like machine vision and end effector systems as enabling robots to perform more complex tasks at a significantly lower price point than ever before.[ii] In addition to these factors, the introduction of low cost, easy to program, “collaborative” robots has expanded the potential market for “robot systems” to much smaller manufacturers who traditionally did not have the engineering support for this type of automation. The ability of these robots to be “taught” a task by a worker on the manufacturing line without the need for traditional programming allows them to be deployed quickly and cost effectively.[iii]
Collaborative Robot Examples

Figure 2: Collaborative Robot Examples
Figure 2 presents examples of collaborative robots currently on the market. Although different in terms of configuration, all of these robots are characterized by their ability to work alongside humans without the need for additional safety shielding. This is accomplished through the use of lightweight materials, the elimination of sharp edges, and sophisticated sensor networks which constantly monitor the forces encountered by the robot arm during its task execution. The speeds and payloads of these robots are usually limited to allow the system to be quickly brought to a stop in the event of unexpected encounters with workers or workplace obstacles.
In addition to the above mentioned safety features, the collaborative robots shown in the figure are all intended to be used directly by factory floor workers without the need for sophisticated programming. Instead, the robots are “taught” each task by manually moving the arm joints to their desired configuration for each step in a production process. The robot is able to remember the taught points and then repeat the process indefinitely.
Applicable Safety Standards
The safety standards for industrial robots and robotic systems are defined by the International Standards Organization (ISO) as ISO 10218-1 and ISO 10218-2 respectively. The first standard covers just the robot itself and does not account for the specific task the robot is performing or the tools (end effectors) that are required. These system related factors are covered in ISO 10218-2. The important point here is that although a robot may be considered “collaborative”, the function of the entire workcell must be considered when evaluating the safety of the complete system. In other words, the use of a “collaborative” robot does not guarantee the safety of the entire system.
As mentioned above, the specific end effector used for a given task can have a significant effect on the safety requirements for the system. For example, equipping a robot (even a “collaborative” one) with a welding head or a spray gun results in a system which requires additional protection to provide safety to nearby workers.

Figure 3 Worcell with Optional Rotary Table
IRIS – An Alternative Approach to Safe “Collaboration”

Figure 4: IRIS Worckcell with optional Conveyor
Figure 3 presents an alternative approach for a collaborative workcell for flexible manufacturing. The IRIS System from IPSUMM, Inc. out of Portsmouth, NH. is a flexible workcell configured to allow all of the benefits of a “collaborative” system without the need to limit the speed, payload or end effector that can be used. This is accomplished by physically shielding only the robot’s workspace while still providing access to feed the system or when the robot is disabled.
The IRIS system as shown in Figure 3 is configured with an optional rotary table. In this specific application, a workpiece is loaded onto the table (the loading zone is outlined by a series of LEDs to aid placement) and then a hot melt adhesive is applied. The exact location and size of the workpiece is measured by an overhead vision system and the robot’s dispensing path is automatically adjusted for optimal coating.
Although shown with its optional rotary table, the IRIS system can also be used with a conveyor feed system (Figure 4) or a static work table. In each case, the system is able to automatically detect its peripheral devices and adjust its operational strategy accordingly. In addition, the system is flexible in terms of its choice of end effector. The system can accommodate both servo and pneumatic grippers as well as other tools such as plasma heads, end of arm cameras, barcode readers, etc. (Figure 5). The modular system software is able to detect the available hardware and then present the operator with a menu of available functions based on the installed hardware.
As mentioned earlier, the IRIS system protects nearby workers by physically shielding the robot’s work envelope. The guarding features an innovative clamshell design intended to maximize access to the work area when the robot is in a safe state while preventing access when the robot is moving. In this way, potential collisions between human and robot can be avoided while also shielding the user from the dangers associated with the end effector (the hot melt glue head, in this example).
Conclusion

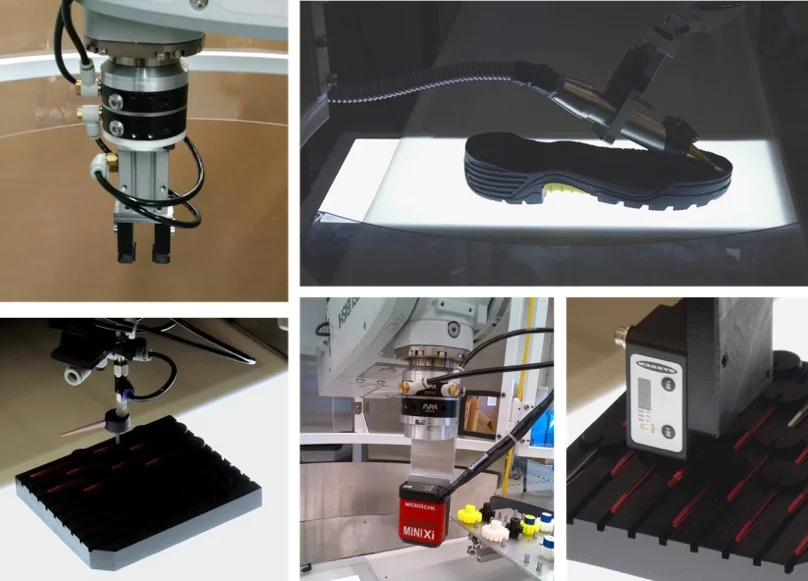
Figure 5: IRIS End Effector Examples
Clockwise from top: Pneumatic Gripper, Plasma Gun, Color Sensor, End-of-Arm Camera, Suction Pickup
The recent release of “collaborative” robots from several suppliers has opened up the idea of flexible automation to many small and medium size manufacturers. These manufacturers were previously shut out from such technology due to the high cost of deployment and the specialized skills required to get them up and running. While many of these robots are suitable for use around people, they are limited in their application because of limits placed on their payload and speed in order to provide the required level of worker safety.
The IRIS system takes an alternative approach to providing a collaborative system by physically shielding the dangerous area of the robot’s workspace while still supplying sufficient access for the given task. In this way, the IRIS system can accommodate virtually any end effector or job task while still be able to be deployed along side of human workers in a real life manufacturing environment.